


An effective fault-tolerant control with slime mold algorithm for unmanned underwater vehicle


Abstract
The proposed fault-tolerant control strategy based on the slime mold algorithm (FTC-SMA) enhances the resilience of multi-thruster unmanned underwater vehicles against thrust loss. In the event of a propulsion system failure, the strategy enables rapid thrust redistribution to restore the original torque and sailing direction, even in the event of a catastrophic thruster failure. This strategy follows the physical limits of the thruster and can effectively solve the over-actuated problem. The effectiveness, efficiency, and stability of FTC-SMA are confirmed through simulation experiments under various fault conditions, demonstrating significant improvements over other algorithms such as particle swarm optimization and grasshopper optimization algorithm.
Keywords
1. INTRODUCTION
With the growth of control applications in complex environments, fault-tolerant control (FTC) has found widespread applications across various fields. During the past three decades, extensive and comprehensive studies have been conducted on FTC, particularly in the aviation, spacecraft, automobiles, and industrial manufacturing sectors[1-4]. These investigations focus on developing systems capable of accommodating component failures during operation, ensuring overall device stability with minimal or acceptable declines in performance. However, research on FTC in underwater vehicles remains limited, largely due to the complexities associated with the underwater environment and marine vehicle systems[5]. Underwater vehicles play a crucial role in a variety of underwater tasks, including deep-sea exploration, ocean rescue, resource exploitation, and underwater target search. The propulsion system is essential for the efficient operation of these vehicles, where the thrusters that consist of the propulsion system control the underwater vehicle's motion by adjusting the torque across six degrees of freedom (DOFs) [6,7]. Thrusters exposed to the elements for a long time are easily affected by the complex marine environment, causing many faults such as mud and aquatic plant attachment, circuit short circuits, thruster collision damage, etc., resulting in thrust loss of varying degrees[8]. Therefore, FTC of underwater propulsion systems is crucial for ensuring robust and efficient navigation of the vehicle[9,10].
Numerous scholars dedicate their efforts to maintaining system stability and preventing losses under various potential failure conditions[11-14]. However, the inherent diversity and uncertainty of failures often pose challenges in achieving comprehensive consideration. Some research suggests an alternative approach by utilizing an excess number of thrusters to optimally redistribute the control system, enabling mission completion and sustaining high performance despite vehicle malfunctions[15,16]. For instance, in the event of a thruster failure during an underwater mission, installing a propulsion system equal to or greater than the DOF provides additional flexibility to compensate for the torque required across all six DOFs. To facilitate thrust reallocation, the weighted pseudo-inverse algorithm is commonly employed for calculations[17]. However, since the physical limitations of the thrusters are not involved, the results obtained by the algorithm may exceed the feasible range, resulting in an overdrive problem; that is, the control input exceeds the actual maximum control range.
To address the challenge of vehicle over-actuation, researchers [18] proposed a fault diagnosis method combining self-organizing mapping and fuzzy logic clustering. They utilized the weighted pseudo-inverse to determine the reassigned control vector, employing truncation or scaling as approximation methods to ensure solution feasibility. However, these two approximation methods roughly force the output to be limited within the feasible range after the calculation is completed. When the calculation result is far beyond the feasible range, direct truncation or scaling will not guarantee accuracy.
Combining optimization methods to find the optimal solution within the allowed range is the current mainstream research direction. Researchers have achieved good results in the FTC field using genetic algorithms, neural network methods, greedy algorithms, etc. However, high-quality data input and long computing time are not easy to apply in underwater submersibles[3,19]. Meta-heuristic algorithms have gained prominence in various applied disciplines[20-23]which can achieve higher performance in a shorter time. Moreover, the solution space for thruster torque redistribution is often uncertain or infinite[24]. In such cases, finding the optimal solution by traversing the entire solution space may be impractical. Meta-heuristic algorithms address this by detecting an approximate optimal solution through random sampling within a vast solution space. Zhu et al. proposed a particle swarm optimization (PSO)-based thruster reconstruction control method to find solutions within the feasible space without relying on truncation or scaling approximation methods to limit the control vector[25]. This method demonstrated a small control error compared to the weighted pseudo-inverse method. Tian et al., considering the uncertainty of ocean currents, introduced an improved cooperative PSO (CPSO) algorithm for FTC[26]. However, due to its simple structure, PSO often struggles to meet the accuracy requirements for complex tasks[27]. Zhu et al. proposed grasshopper optimization algorithm (GOA), which obtained satisfactory results[28,29]. However, there is still room for improvement in real-time processing and accuracy.
This paper proposes for the first time a practical case application of combining the slime mold algorithm (SMA) with FTC to solve the thrust loss fault of underwater vehicle propellers. By quantifying the thrust loss of each propeller, SMA is used to quickly and effectively redistribute the thrust. Compared with traditional methods such as T-approximation or S-approximation, the SMA algorithm can solve the drive saturation problem, and compared with the most advanced swarm intelligence optimization method GOA currently used in underwater submersibles, it achieves higher accuracy and faster computational efficiency.
The contributions of this paper are as follows:
The fault-tolerant control strategy based on the slime mold algorithm (FTC-SMA) effectively solves over-actuation, a common challenge in conventional control systems.
The proposed FTC-SMA not only boasts fast convergence speeds but also maintains high accuracy. This dual advantage allows for the quick settling of redistributing thrust to the thrusters.
Three fault cases, single-fault case, double-fault case and quadruple-fault case, were designed and simulated to demonstrate the adaptability and reliability of FTC-SMA under different fault conditions.
The article is organized as follows. Section 2 provides an in-depth introduction to the thruster configuration in unmanned underwater vehicles (UUVs) and the underlying principles of FTC for underwater vehicles. Section 3 explores the characteristics of the SMA and details its integration with FTC methodologies. Section 4 presents and discusses the outcomes of computer simulations applying the proposed algorithm to various fault conditions, and compares results obtained under different fault scenarios using computer simulation algorithms. Section 5 summarizes key findings from the simulations, draws conclusions based on the results and discusses potential implications for the field of FTC in UUVs.
2. THRUSTER CONFIGURATION AND PROBLEM STATEMENT
In this section, a detailed model and illustration of the propulsion system of the UUV being developed in our lab is provided. The operational context of FTC in the vehicle is elucidated and analyzed comprehensively.
2.1. Thruster configuration
“Haijian” submarine is a small search and rescue UUV that can perform exploration, detection and grabbing operations [Figure 1][30]. The vehicle features a configuration with six thrusters distributed around its structure, as depicted in Figure 2. Each thruster is denoted by

Figure 1. “Haijian” UUV. UUV: Unmanned underwater vehicle.

Figure 2. Top view and side view of UUV thruster system distribution. UUV: Unmanned underwater vehicle.
where
Combined with the position structure information of the thruster, the relationship between its torque vector and thruster force is as follows:
where
where
The whole propulsion system is composed of two different types of thrusters, among which
Dividing Equation (2) by Equation (4) limits the output in a certain range of -1 to 1, and set
Finally, the conversion between thruster forces and torques was achieved and standardized, limiting the range of all torques and forces in the equation to -1 to 1; this enables better understanding and easier visualization of the problem.
All physical parameters are removed from the matrix during the normalization process. The compact form of
In order to quantify the damage of each thruster, the thruster weight matrix is usually defined as
where
Combine Equation (5) with Equation (6) to get the following transition
where
2.2. Problem statement
This section delineates the FTC problem within the UUV multi-thruster system, elucidating the target requirements and constraint information pivotal to the control process.
For the UUV multi-thruster system, the ideal FTC is through
where
In practical applications, due to limitations in thruster capabilities, such as the inability to provide infinite drive input for completing voyages, an over-actuated phenomenon occurs. Therefore, in optimization calculations, the actual torque or force that the thruster can output must be physically constrained to ensure reliable navigation. The maximum thrust of the thruster is determined by the maximum torque provided by the vehicle, which serves as a fundamental constraint in the vehicle control problem.
In subsequent experiments, both the maximum torque and the maximum thrust were constrained within the range of -1 to 1. These variables were employed to quantify their influence on the results during the control process.
3. FTC BASED ON SMA DESIGN
This section reviews the basic principles of SMA and then explores its application in FTC.
3.1. SMA
The SMA is a novel meta-heuristic algorithm, which primarily emulates the behavior and morphological transformations of slime molds during foraging in nature[31]. The adoption of distributed computing principles in SMA allows multiple agents to simultaneously explore the solution space, enhancing search efficiency through collaborative information exchange. This distributed approach empowers SMA to facilitate the discovery of global optimal solutions while avoiding the pitfalls of local minima. The self-organizing nature of SMA, characterized by entities interacting and adapting through localized planning, contributes to its adaptability and robustness in complex and dynamic environments. Specifically, SMA comprises three key stages: approach food stage, wrap food stage, and oscillation stage.
3.1.1. Approach food
In the approach food stage, the slime mold moves towards the food source guided by the scent in the air. Its approach behavior can be mathematically given by
where
where
3.1.2. Wrap food
The wrap food stage simulates the contraction pattern of myxomycetes vein tissue. As the concentration of food increases in venous contact, the biological oscillator produces a stronger propagation wave, accelerating the cytoplasmic flow. Equation (11) models the positive and negative feedback process between slime mold weight and food concentration. The logarithm function
where
3.1.3. Oscillation
In the grabbing food stage, slime molds utilize propagation waves generated by biological oscillators to alter the velocity of cytoplasm flow within veins. Parameters
3.2. FTC-SMA
In this paper, the SMA is employed to determine the optimal control vector. The tolerant control system structure is illustrated in Figure 3. The input to the system is the desired torque vector. The fault identification unit monitors the status of the thrusters, and the output is the thruster weight matrix Equation (6) that encapsulates the fault information, and the FTC-SMA makes corresponding adjustments within the limit parameters, the recalculated thrust required by each thruster is output to the thruster system to achieve the purpose of FTC. It is worth noting that, given that the main focus of this paper is FTC, we assume that the fault identification unit has accurately identified and calculated the thrust loss of each thruster when a fault occurs.

Figure 3. The structure diagram of tolerant control system.
The pseudo-code of FTC-SMA is presented, which helps to understand its principle and structure better. The specific steps are as follows:
Algorithm 1 Multi-thruster FTC based on SMA algorithm Input: thruster weight matrix
Initialize the parameter
while
Calculate the
Update
Calculate the
for each search portion do
Update
Update positions by Equation (12)
end for
end while
Output:
1. Given thruster weight matrix
2. Calculate fitness
3. Generate random number
4. Calculate fitness value after updating the position and update the global optimal solution.
5. Check termination condition; if met, output global optimal solution (force of each thruster after redistribution
4. SIMULATION AND ANALYSIS
In this section, the computer simulation results of the T-approximation, S-approximation, PSO, GOA and SMA for multi-thruster FTC are presented. The purpose is to compare their performance under identical working conditions. Various fault cases have been selected to highlight the superiority of the FTC-SMA in terms of accuracy and stability. All simulations are conducted using Python 3.9, ensuring that each run achieves optimal convergence for all algorithms. In this paper, it is assumed that there are no other faults except the thruster, such as incorrect sensor readings or controller failures. It is also assumed that the thrust loss of the thruster has been accurately identified by the Fault Identification unit and the thruster weight matrix
4.1. Single-fault case
The desired torque vector
Results of single-fault case
| PSO: Particle swarm optimization; GOA: grasshopper optimization algorithm; SMA: slime mold algorithm. | ||||
| T-approximation | 0.1331 | 0.1472 | ||
| S-approximation | 0.1640 | 0.0852 | ||
| PSO | 0.2428 | 0.0001 | ||
| GOA | 0.1926 | 0.0002 | ||
| SMA | ||||
The pseudo-inverse solution
Figure 4 clearly shows the results of all algorithms. Without a doubt, the SMA stands out with the best result (orange line), which closely matches the actual torque required. Errors in the T-approximation (blue line) and S-approximation (green line) are unavoidable due to the method of directly truncating and scaling the portion beyond the limit. Since only thrusters

Figure 4. Multi-thruster reallocation problem for single-fault case.
4.2. Double-fault case
The desired torque vector
Results of double-fault case
| PSO: Particle swarm optimization; GOA: grasshopper optimization algorithm; SMA: slime mold algorithm. | ||||
| T-approximation | 0.1664 | 0.1642 | ||
| S-approximation | 0.1855 | 0.1372 | ||
| PSO | 0.2863 | 0.0110 | ||
| GOA | 0.1413 | 0.0001 | ||
| SMA | ||||
The pseudo-inverse solution
When more thrusters experience thrust loss, the error rates for all methods increase compared to single-fault case [Figure 5]. As seen in the single-fault case, the faulty thrusters do not include T5 and T6. Therefore, the torque output error on the Heave and Roll axes remains zero through the T-approximation. However, both the T-approximation and S-approximation show large errors in direction, reaching 15%. The magnitude error also exceeds 15%. The magnitude error with PSO increases significantly, almost hitting 30%. In contrast, both GOA and SMA managed to adjust the submarine's direction effectively. SMA outperforms GOA in controlling magnitude error, keeping it within 5%. Even with two thrusters experiencing thrust loss, SMA's torque output optimization still shows good performance.
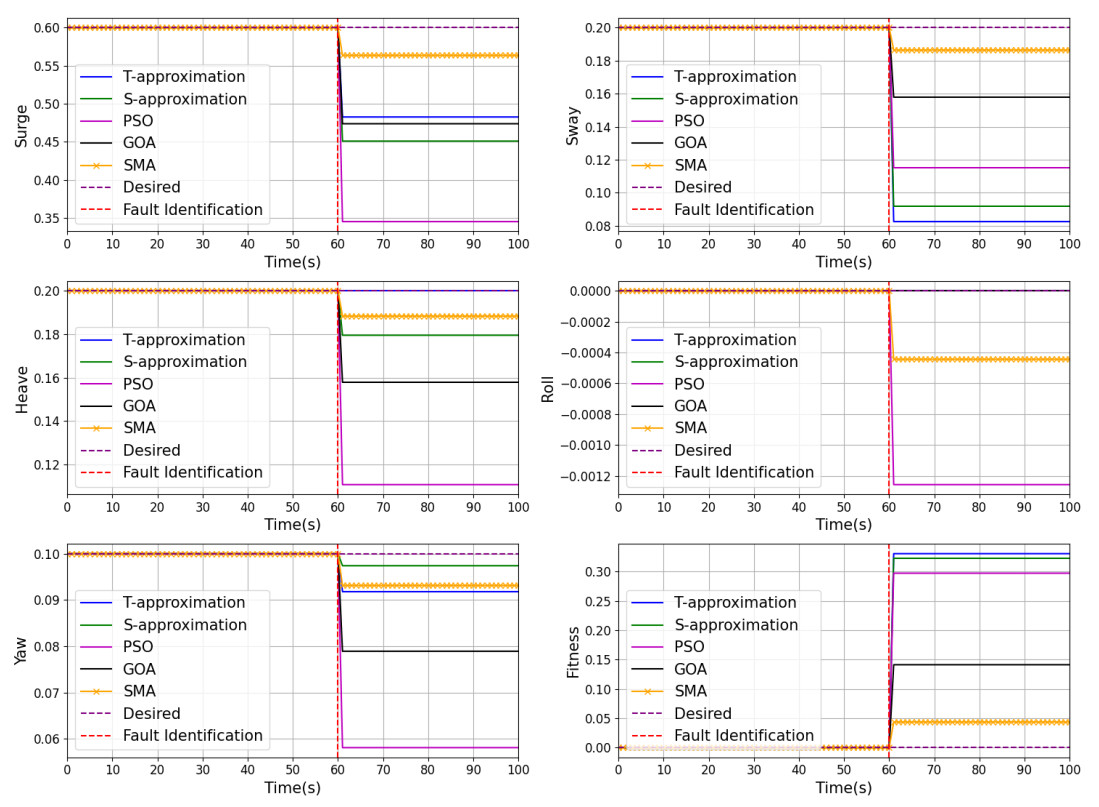
Figure 5. Multi-thruster reallocation problem for double-fault case.
4.3. Quadruple-fault case
The desired torque vector
Results of quadruple-fault case
| PSO: Particle swarm optimization; GOA: grasshopper optimization algorithm; SMA: slime mold algorithm. | ||||
| T-approximation | 0.2405 | 0.1989 | ||
| S-approximation | 0.2812 | 0.1927 | ||
| PSO | 0.2081 | 0.0001 | ||
| GOA | 0.3977 | 0.0001 | ||
| SMA | ||||
The pseudo-inverse solution
Due to damage to the vertical thruster, both T-approximation and S-approximation lost control over the Heave and Roll axes, leading to increased errors and loss of effective submarine control [Figure 6]. Despite these challenges, PSO, GOA, and SMA corrected the direction error successfully. Notably, even in such difficult conditions, SMA managed to keep the magnitude error within 5%. This control strategy maintained the submarine’s direction without reducing its operational efficiency. SMA consistently delivered the best results in cases involving single-fault, double-fault, or quadruple-fault, demonstrating its potential as a reliable FTC method.

Figure 6. Multi-thruster reallocation problem for quadruple-fault case.
4.4. Efficiency and stability
This section compares the efficiency of the three algorithms: PSO, GOA, and SMA. Figure 7 illustrates the relationship between time and optimum fitness for three algorithms applied to thruster power redistribution under single-fault, double-fault, and quadruple-fault cases. Notably, after a large number of experiments, we found that the increase in the number of thruster failures does not significantly affect the running time of each algorithm. Therefore, the running times shown in the paper are the average results obtained from multiple times.

Figure 7. Runtime and fitness of PSO, GOA and SMA methods using the same operating parameters for different fault cases. PSO: Particle swarm optimization; GOA: grasshopper optimization algorithm; SMA: slime mold algorithm.
The results are displayed in Table 4. All operating parameters are consistent. Runtime represents the total duration required for the algorithm to complete 200 iterations, ensuring that all algorithms have fully converged after these iterations. Due to its simple structure, PSO achieves the fastest running speed at just 0.119 s. However, PSO consistently falls short in terms of accuracy across all fault conditions. GOA, on the other hand, exhibits strong performance in accuracy for both single and double-fault cases. Despite this, its slower speed, approximately 0.3 s, fails to meet the real-time requirements for FTC systems. Moreover, under the quadruple-fault case, the performance of GOA deteriorates significantly; a sharp increase in magnitude error makes it incapable of FTC. SMA may not match the speed of PSO, with a running time of 0.24 s, but it consistently delivers the best results across all cases, including extreme ones. These observations affirm the effectiveness of FTC in UUVs and underscore the superior adaptability of SMA under various fault cases.
Fitness and time of PSO, GOA, FTC-SMA in different fault cases
| Single-fault case | Double-fault case | Quadruple-fault case | ||||||
| Fitness | Time (s) | Fitness | Time (s) | Fitness | Time (s) | |||
| PSO: Particle swarm optimization; GOA: grasshopper optimization algorithm; FTC-SMA: fault-tolerant control strategy based on the slime mold algorithm. | ||||||||
| PSO | 0.2429 | 0.1112 | 0.2973 | 0.1183 | 0.2082 | 0.1191 | ||
| GOA | 0.1928 | 0.2809 | 0.1413 | 0.2711 | 0.3978 | 0.2977 | ||
| SMA | 0.0058 | 0.2370 | 0.0439 | 0.2353 | 0.0490 | 0.2480 | ||
5. CONCLUSION
This paper employs an effective FTC-SMA. The FTC strategy leverages the SMA for rapid redistribution of thruster power, effectively constraining dynamic output within the limits of physical constraints. Simulation experiments were conducted using the weighted pseudo-inverse algorithm, PSO, GOA, and SMA for single-fault, double-fault, and quadruple-fault cases. The comparative analysis reveals that the control strategy based on SMA consistently yields superior results across various fault conditions. This conclusion is reinforced by the comprehensive comparison of the efficiency of PSO, GOA, and SMA under different fault conditions. In the future, pool experiments are planned to further evaluate the performance of the FTC-SMA algorithm in actual operations.
DECLARATIONS
Authors’ contributions
Wrote the PSO, GOA, and SMA programs and the draft: Zeng, T.
Organized the experiment and guided the work: Zhu, D.; Gu, C.; Simon, X. Y.
Availability of data and materials
Not applicable.
Financial support and sponsorship
None.
Conflicts of interest
Simon, X. Y. is the Editor-in-Chief of the journal Intelligence & Robotics, Zhu, D. is the guest editor of the Special Issue of “Updates in Underwater Robotics”, and Editorial Board Member of the journal Intelligence & Robotics, while the other authors have declared that they have no conflicts of interest.
Ethical approval and consent to participate
Not applicable.
Consent for publication
Not applicable.
Copyright
© The Author(s) 2025.
REFERENCES
1. Li, J.; Yang, G. Development and prospect of adaptive fault-tolerant control. Control. Decis. 2014, 29, 1921-26.
2. Li, Y.; Hou, Y.; Liu, C. Adaptive optimal fault-tolerant control based on fault degree. J. Comput. Eng. Appl. 2021, 57, 295-302.
3. Shen, Q.; Jiang, B.; Shi, P.; Lim, C. C. Novel neural networks-based fault tolerant control scheme with fault alarm. IEEE. Trans. Cybern. 2014, 44, 2190-201.
4. Shi, P.; Wang, X.; Meng, X.; He, M.; Mao, Y.; Wang, Z. Adaptive fault-tolerant control for open-circuit faults in dual three-phase PMSM drives. IEEE. Trans. Power. Electron. 2023, 38, 3676-88.
5. Kadiyam, J.; Parashar, A.; Mohan, S.; Deshmukh, D. Actuator fault-tolerant control study of an underwater robot with four rotatable thrusters. Ocean. Eng. 2020, 197, 106929.
6. Baraniuk, T.; Simoni, R.; Weihmann, L. Fault-tolerant architecture for AUVs. In: 2018 IEEE/OES Autonomous Underwater Vehicle Workshop (AUV), Porto, Portugal. Nov 06-09, 2018. IEEE, 2018. pp. 1-6.
7. Panda, J. P.; Mitra, A.; Warrior, H. V. A review on the hydrodynamic characteristics of autonomous underwater vehicles. J. Eng. Marit. Environ. 2021, 235, 15-29.
8. Yu, J.; Zhang, A.; Wang, X. Research on thruster fault tolerant control allocation of a 7000m manned submarine. Robot 2006, 28, 519-24.
9. Esna, A. A.; Khaki, S. A.; Yazdanpanah, M. J. Reconfigurable control system design using eigen structure assignment: static, dynamic and robust approaches. Int. J. Control. 2005, 78, 1005-16.
10. Lin, C. M.; Chen, C. H. Robust fault-tolerant control for a biped robot using a recurrent cerebellar model articulation controller. IEEE. Trans. Syst. Man. Cybern. B. 2007, 37, 110-23.
11. Conte, G. Underwater robots: motion and force control of vehicle–manipulator systems. Int. J. Adapt. Control. Signal. Process. 2004, 18, 603-4.
12. Yang, K. C.; Yuh, J.; Choi, S. K. Experimental study of fault-tolerant system design for underwater robots. In: Proceedings. 1998 IEEE International Conference on Robotics and Automation (Cat. No.98CH36146), Leuven, Belgium. May 20, 1998. IEEE, 1998; pp. 1051-6.
13. Yang, K. C. H.; Yuh, J.; Choi, S. K. Fault-tolerant system design of an autonomous underwater vehicle ODIN: an experimental study. Int. J. Syst. Sci. 1999, 30, 1011-9.
14. Zhang, Y.; Jiang, J. Bibliographical review on reconfigurable fault-tolerant control systems. Annu. Rev. Control. 2008, 32, 229-52.
15. Podder, T. K.; Sarkar, N. Fault tolerant decomposition of thruster forces of an autonomous underwater vehicle. In: Proceedings 1999 IEEE International Conference on Robotics and Automation (Cat. No.99CH36288C), Detroit, USA. May 10-15, 1999. IEEE, 1999; pp. 84-9.
16. Podder, T. K.; Sarkar, N. Fault-tolerant control of an autonomous underwater vehicle under thruster redundancy. Robotics. Auton. Syst. 2001, 34, 39-52.
17. Fossen, T. I. Guidance and control of ocean vehicles. 1994. https://books.google.com/books/about/Guidance_and_Control_of_Ocean_Vehicles.html?id=cwJUAAAAMAAJ. (accessed on 2025-03-19).
18. Omerdic, E.; Roberts, G. Thruster fault diagnosis and accommodation for open-frame underwater vehicles. Control. Eng. Pract. 2004, 12, 1575-98.
19. Zhao, W.; Liu, H.; Wan, Y. Data-driven fault-tolerant formation control for nonlinear quadrotors under multiple simultaneous actuator faults. Syst. Control. Lett. 2021, 158, 229-52.
20. Chen, H.; Jiao, S.; Heidari, A. A.; Wang, M.; Chen, X.; Zhao, X. An opposition-based sine cosine approach with local search for parameter estimation of photovoltaic models. Energy. Convers. Manag. 2019, 195, 927-42.
21. Chen, H.; Xu, Y.; Wang, M.; Zhao, X. A balanced whale optimization algorithm for constrained engineering design problems. Appl. Math. Model. 2019, 71, 45-59.
22. Wang, M.; Chen, H.; Yang, B.; et al. Toward an optimal kernel extreme learning machine using a chaotic moth-flame optimization strategy with applications in medical diagnoses. Neurocomputing 2017, 267, 69-84.
23. Wang, M.; Chen, H. Chaotic multi-swarm whale optimizer boosted support vector machine for medical diagnosis. Appl. Soft. Comput. 2020, 88, 105946.
24. Chen, M.; Liu, Y.; Zhu, D.; Shen, A.; Wang, C.; Ji, K. Parameter identification of an open-frame underwater vehicle based on numerical simulation and quantum particle swarm optimization. Intell. Robot. 2024, 4, 216-29.
25. Zhu, D.; Liu, J.; Yang, S. X. Particle swarm optimization approach to thruster fault-tolerant control of unmanned underwater vehicles. Int. J. Robot. Autom. 2011, 26.
26. Tian, Q.; Wang, T.; Liu, B.; Ran, G. Thruster fault diagnostics and fault tolerant control for autonomous underwater vehicle with ocean currents. Machines 2022, 10, 582.
27. Zhu, D.; Liu, Q.; Hu, Z. Fault-tolerant control algorithm of the manned submarine with multi-thruster based on quantum-behaved particle swarm optimization. Int. J. Control. 2011, 84, 1817-29.
28. Zhu, D. J.; Wang, L.; Hu, Z.; Yang, S. X. A grasshopper optimization-based fault-tolerant control algorithm for a human occupied submarine with the multi-thruster system. Ocean. Eng. 2021, 242, 110101.
29. Zhu, D. J.; Wang, L.; Zhang, H.; Yang, S. X. A GOA-based fault-tolerant trajectory tracking control for an underwater vehicle of multi-thruster system without actuator saturation. IEEE. Trans. Autom. Sci. Eng. 2024, 21, 771-82.
30. Sun, B.; Pang, W.; Chen, M.; Zhu, D. Development and experimental verification of search and rescue ROV. Intell. Robot. 2022, 4, 355-70.
Cite This Article
How to Cite
Download Citation
Export Citation File:
Type of Import
Tips on Downloading Citation
Citation Manager File Format
Type of Import
Direct Import: When the Direct Import option is selected (the default state), a dialogue box will give you the option to Save or Open the downloaded citation data. Choosing Open will either launch your citation manager or give you a choice of applications with which to use the metadata. The Save option saves the file locally for later use.
Indirect Import: When the Indirect Import option is selected, the metadata is displayed and may be copied and pasted as needed.
About This Article
Copyright















Comments
Comments must be written in English. Spam, offensive content, impersonation, and private information will not be permitted. If any comment is reported and identified as inappropriate content by OAE staff, the comment will be removed without notice. If you have any queries or need any help, please contact us at [email protected].