


Figure1
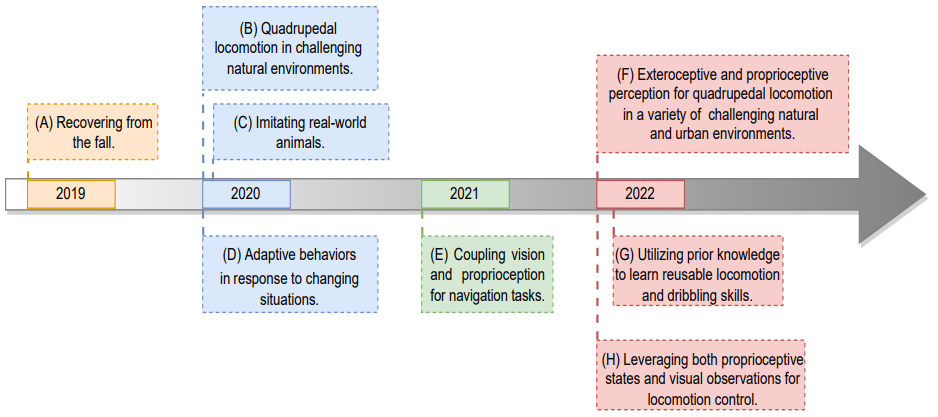
Figure 1. Several typical quadrupedal locomotion studies based on DRL algorithm: (A) recovering from a fall[6]; (B) a radically robust controller for quadrupedal locomotion in challenging natural environments[7]; (C) learning agile locomotion skills by imitating real-world animals[10]; (D) producing adaptive behaviors in response to changing situations[9]; (E) coupling vision and proprioception for navigation tasks[11]; (F) integrating exteroceptive and proprioceptive perception for quadrupedal locomotion in a variety of challenging natural and urban environments over multiple seasons[8]; (G) utilizing prior knowledge of human and animal movement to learn reusable locomotion and dribbling skills[12]; and (H) leveraging both proprioceptive states and visual observations for locomotion control[13].



