

Volume 4, Issue 1 (March, 2024) – 6 articles
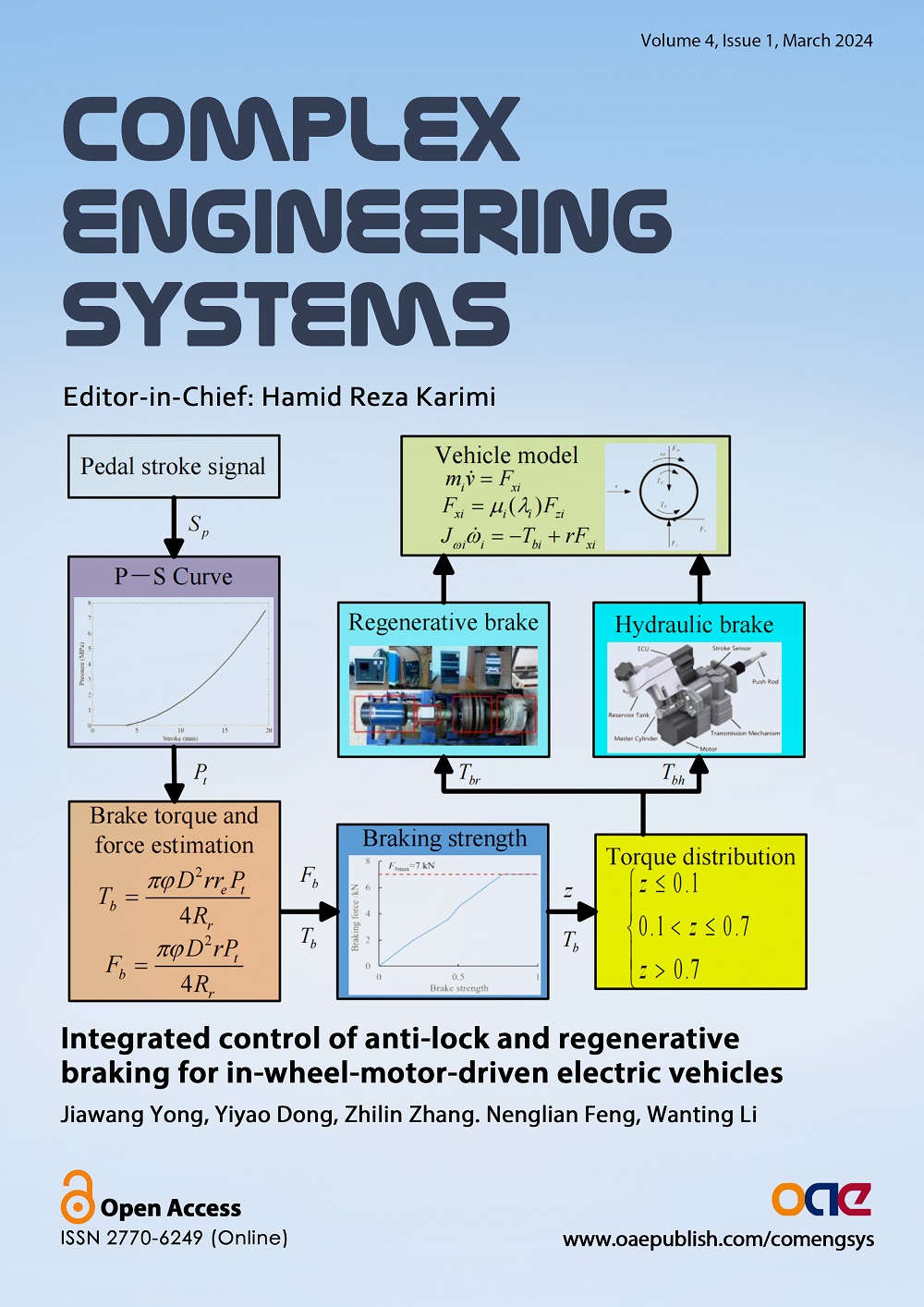
Cover Picture: The in-wheel motor is increasingly used in electric vehicles due to the significantly improved controllability, response capability, and energy recovery efficiency based on this technology. However, the independent control of in-wheel motors will lead to braking torque distribution problems, especially in a situation where anti-lock braking systems (ABS) are triggered, which may cause the braking energy to be unrecoverable without the coordinated control between anti-lock and RB for two in-wheel motor-driven electric vehicles based on the RB efficiency map. Control-oriented wheel dynamics and slip ratio models of the system are generated. A sliding mode intervention of regenerative braking (RB) control. This paper presents an integrated algorithm to realize the control-based ABS controller is designed to prevent the wheels from locking and to maintain the slip ratio within a desired level, and the stability and robustness of the controller to uncertainties and disturbances are discussed. Moreover, the braking strength of the driver is calculated and divided into different modes to derive a dynamic braking torque distribution to improve the energy recovery efficiency. The hardware-in-the-loop simulation results show that the recovered energy of the proposed strategy under ABS-triggered maneuver is increased by 52.9% than that of the Proportional, Integral, and Derivative controller and can effectively improve the braking performance and stability.
view this paper 


