

Figure1
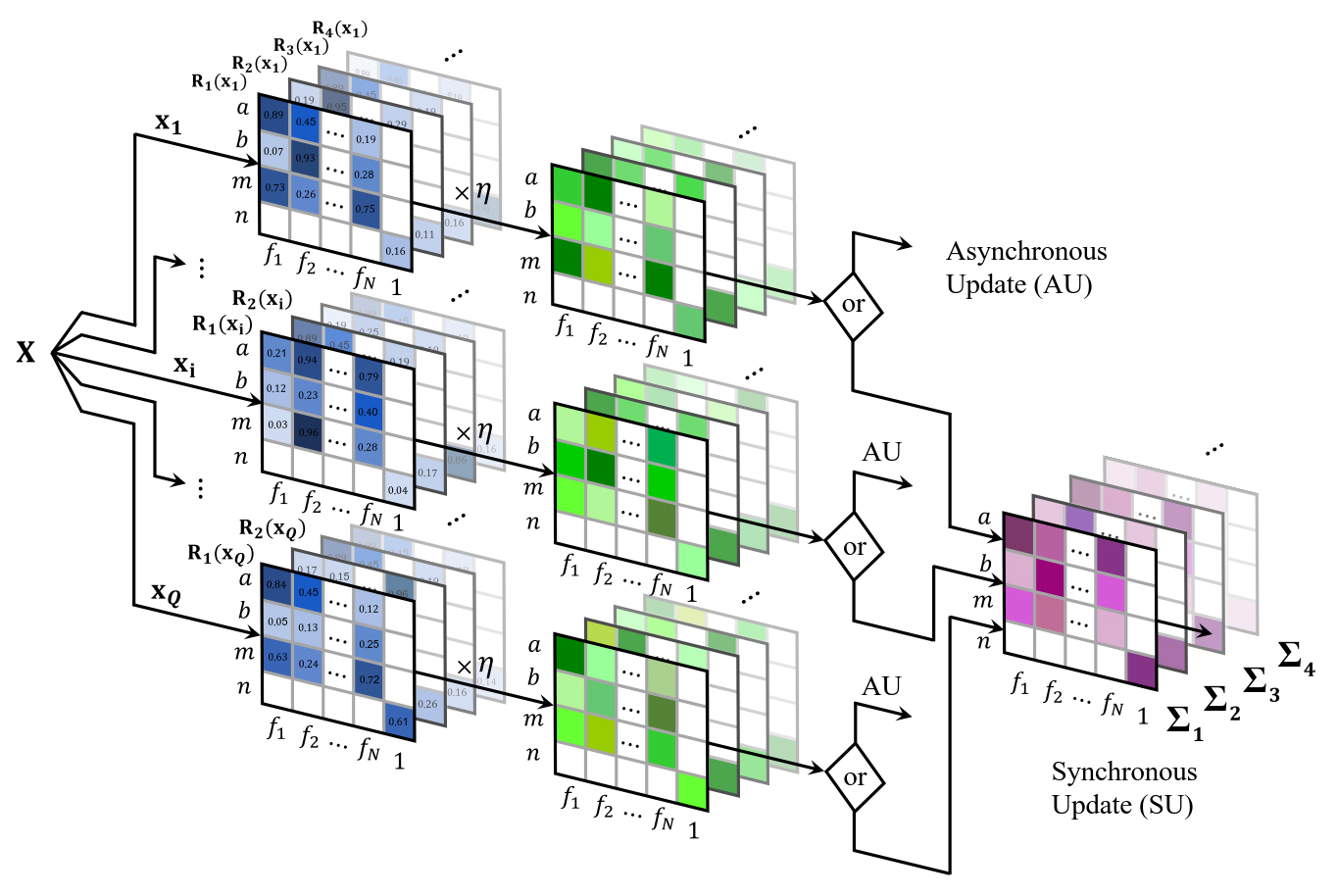
Figure 1. Synchronous and asynchronous approaches for the update of the system's parameters. Each observation of the dataset has a different set of matrices that together constitute the gradient of the loss function (transparent matrices of the back refer to different clusters). The entries of the blue matrices represent the derivatives with respect to the different parameters of the system; the rows determine the type of the parameter,




